FlingBot: The Unreasonable Effectiveness of
Dynamic Manipulations for Cloth
Unfolding
Best System Paper,
Oral Presentation
Conference on Robot Learning 2021
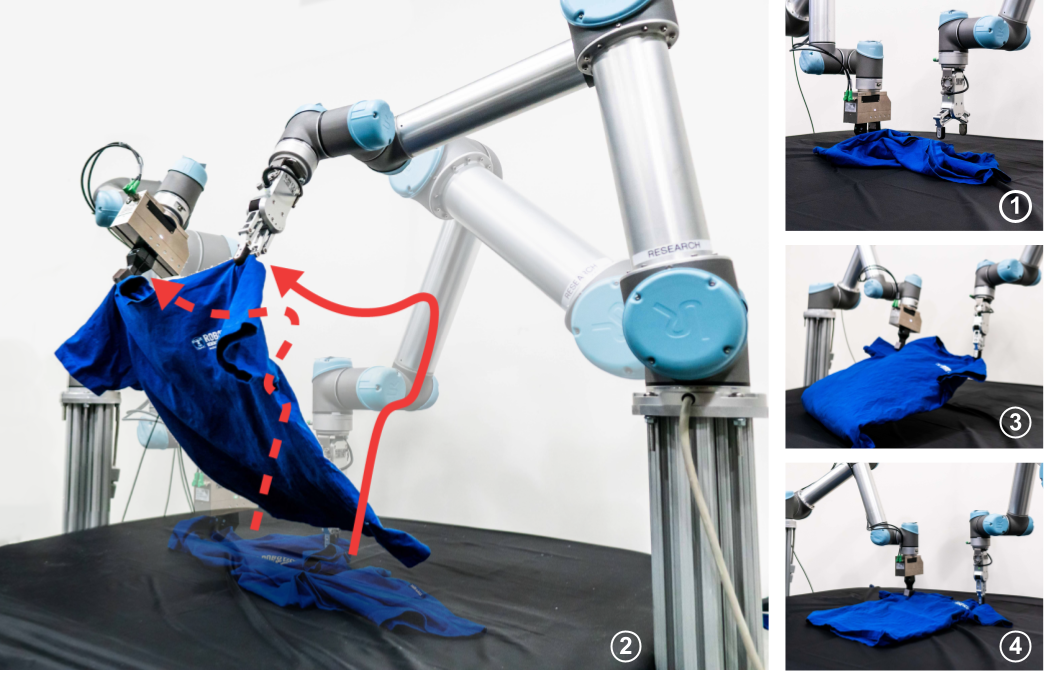
High-velocity dynamic actions (e.g., fling or throw) play a crucial role in our everyday interaction with deformable objects by improving our efficiency and effectively expanding our physical reach range. Yet, most prior works have tackled cloth manipulation using exclusively single-arm quasi-static actions, which requires a large number of interactions for challenging initial cloth configurations and strictly limits the maximum cloth size by the robot's reach range. In this work, we demonstrate the effectiveness of dynamic flinging actions for cloth unfolding with our proposed self-supervised learning framework, FlingBot. Our approach learns how to unfold a piece of fabric from arbitrary initial configurations using a pick, stretch, and fling primitive for a dual-arm setup from visual observations. The final system achieves over 80% coverage within 3 actions on novel cloths, can unfold cloths larger than the system's reach range, and generalizes to T-shirts despite being trained on only rectangular cloths. We also finetuned FlingBot on a real-world dual-arm robot platform, where it increased the cloth coverage over 4 times more than the quasi-static baseline did. The simplicity of FlingBot combined with its superior performance over quasi-static baselines demonstrates the effectiveness of dynamic actions for deformable object manipulation.
Paper & Code
Latest Paper Version: ArXiv. Code, simulation environment and instructions to download data: Github.

Conference on Robot Learning Oral Presentation
Real World Results
Normal Rectangular Cloths
With as little as two interactions, a two-arm fling can unfurl an initially crumpled cloth completely. FlingBot's efficiency in cloth unfolding means key features of the cloth are quickly revealed for downstream perception and manipulation tasks.
Large Rectangular Cloths
High-velocity dynamic actions effectively expands the system's reach range. This allows FlingBot to throw corners of large cloths to locations that are difficult or impossible for the system to reach directly.
Shirts
A dynamic action policy for cloth unfolding does not have to learn complex schemes for choosing locations for pick and place, which are highly dependent on each other and the cloth's local geometry. Instead, it just needs to find two good grasp points then relies on high-velocities to do the rest. As a result, dynamic action policies learns simpler and more generalizable strategies for cloth unfolding. Thus, despite being trained on only rectangular cloths, FlingBot directly generalizes to shirts.
Pick & Place Baseline
In contrast, quasi-static action policies, which uses actions like pick & place, struggle to unfold severely crumpled cloths, even with many more interaction steps. Indeed, this is why dynamic actions play such a crucial role in our everyday manipulation of deformable objects.
Team
Columbia University in the City of New York
Citation
@inproceedings{ha2021flingbot,
title={FlingBot: The Unreasonable Effectiveness of Dynamic Manipulation for Cloth Unfolding},
author={Ha, Huy and Song, Shuran},
booktitle={Conference on Robotic Learning (CoRL)},
year={2021}
}
If you have any questions, please feel free to contact Huy
Ha.